JointLimitMonitor.hpp File Reference
#include <vector>#include <sstream>#include <cmath>#include <boost/thread.hpp>#include "generic/Logger.hpp"#include "generic/Units.hpp"#include "generic/Time.hpp"#include "generic/Exceptions.hpp"#include "youbot/ProtocolDefinitions.hpp"#include "youbot/YouBotJointStorage.hpp"#include "youbot/YouBotSlaveMsg.hpp"
Include dependency graph for JointLimitMonitor.hpp:

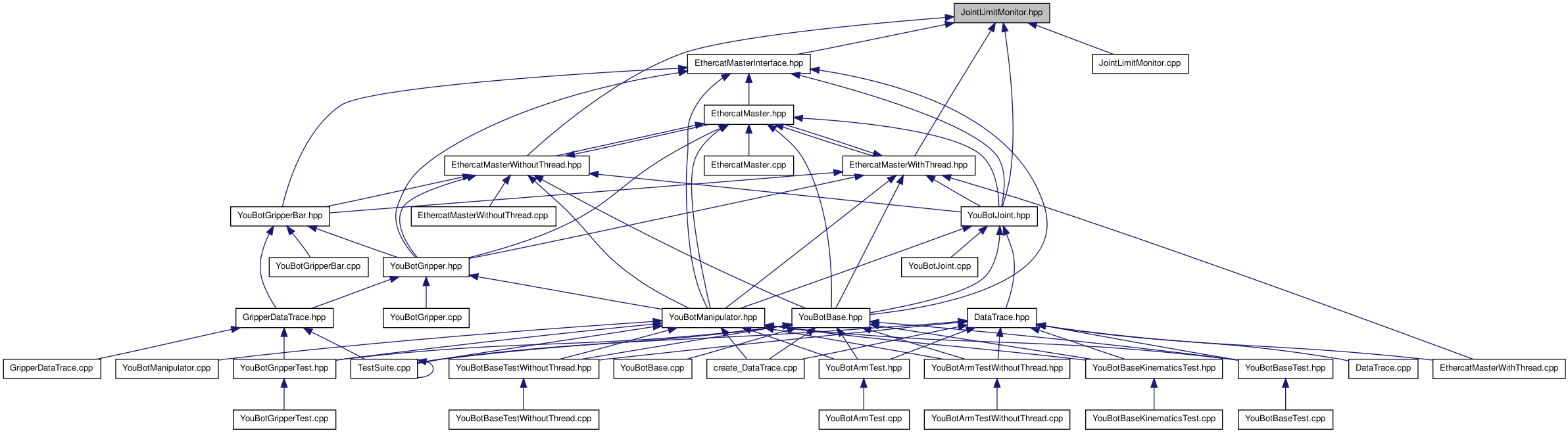
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| class | JointLimitMonitor |
| It monitors the joint position and will decelerate and stop the joint if it is close the limits. More... | |
