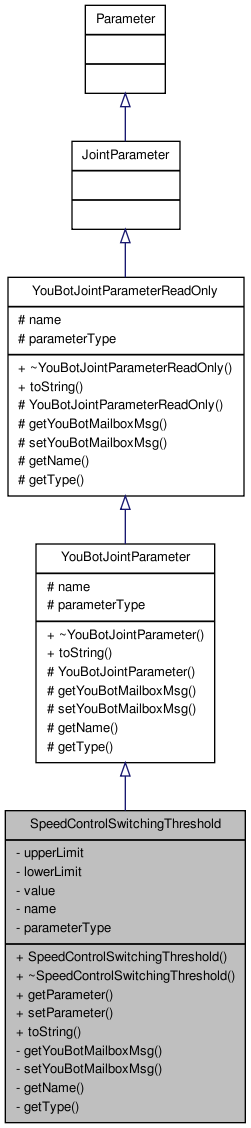
SpeedControlSwitchingThreshold Class Reference
Adjusts the limit to switch between first velocity PID parameter set and second velocity PID parameter set. More...
#include <YouBotJointParameter.hpp>
Public Member Functions | |
| SpeedControlSwitchingThreshold () | |
| virtual | ~SpeedControlSwitchingThreshold () |
| void | getParameter (quantity< angular_velocity > ¶meter) const |
| void | setParameter (const quantity< angular_velocity > ¶meter) |
| void | toString (std::string &value) |
Friends | |
| class | YouBotJoint |
Detailed Description
Adjusts the limit to switch between first velocity PID parameter set and second velocity PID parameter set.
If the velocity threshold is set to zero, the parameter set 2 is used all the time.
Definition at line 624 of file YouBotJointParameter.hpp.
Constructor & Destructor Documentation
Definition at line 684 of file YouBotJointParameter.cpp.
| ~SpeedControlSwitchingThreshold | ( | ) | [virtual] |
Definition at line 693 of file YouBotJointParameter.cpp.
Member Function Documentation
| void getParameter | ( | quantity< angular_velocity > & | parameter | ) | const |
Definition at line 698 of file YouBotJointParameter.cpp.
| void setParameter | ( | const quantity< angular_velocity > & | parameter | ) |
Definition at line 704 of file YouBotJointParameter.cpp.
| void toString | ( | std::string & | value | ) | [virtual] |
Implements YouBotJointParameter.
Definition at line 717 of file YouBotJointParameter.cpp.
Friends And Related Function Documentation
friend class YouBotJoint [friend] |
Reimplemented from YouBotJointParameter.
Definition at line 625 of file YouBotJointParameter.hpp.
The documentation for this class was generated from the following files:
