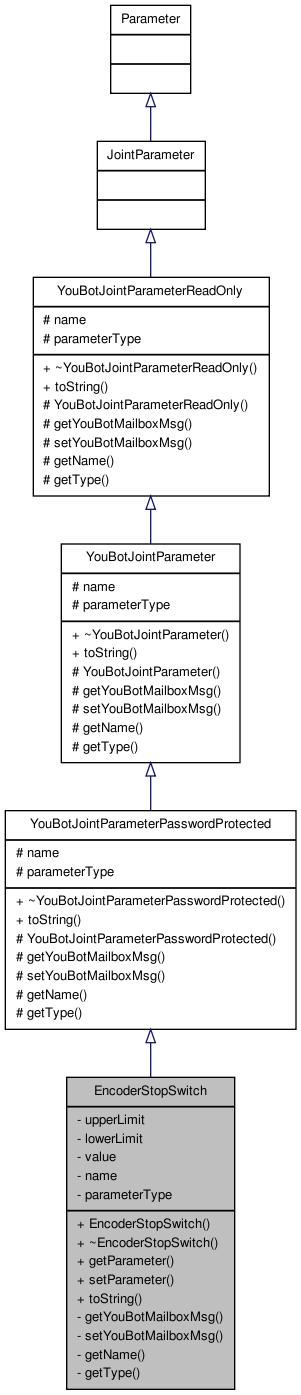
EncoderStopSwitch Class Reference
Encoder stop switch. More...
#include <YouBotJointParameterPasswordProtected.hpp>
Public Member Functions | |
| EncoderStopSwitch () | |
| virtual | ~EncoderStopSwitch () |
| void | getParameter (unsigned int ¶meter) const |
| void | setParameter (const unsigned int parameter) |
| void | toString (std::string &value) |
Friends | |
| class | YouBotJoint |
Detailed Description
Encoder stop switch.
Bit 0: Left stop switch enable
When this bit is set the motor will be stopped if it is moving in negative direction and the left stop switch input becomes active.
Bit 1: Right stop switch enable
When this bit is set the motor will be stopped if it is moving in positive direction and the right stop switch input becomes active
Please see StopSwitchPolarity for selecting the stop switch input polarity.
Definition at line 404 of file YouBotJointParameterPasswordProtected.hpp.
Constructor & Destructor Documentation
Definition at line 518 of file YouBotJointParameterPasswordProtected.cpp.
| ~EncoderStopSwitch | ( | ) | [virtual] |
Definition at line 527 of file YouBotJointParameterPasswordProtected.cpp.
Member Function Documentation
| void getParameter | ( | unsigned int & | parameter | ) | const |
Definition at line 532 of file YouBotJointParameterPasswordProtected.cpp.
| void setParameter | ( | const unsigned int | parameter | ) |
Definition at line 538 of file YouBotJointParameterPasswordProtected.cpp.
| void toString | ( | std::string & | value | ) | [virtual] |
Implements YouBotJointParameterPasswordProtected.
Definition at line 551 of file YouBotJointParameterPasswordProtected.cpp.
Friends And Related Function Documentation
friend class YouBotJoint [friend] |
Reimplemented from YouBotJointParameterPasswordProtected.
Definition at line 405 of file YouBotJointParameterPasswordProtected.hpp.
The documentation for this class was generated from the following files:
