JointTrajectoryController.hpp File Reference
#include <vector>#include <string>#include <cstdio>#include <stdexcept>#include <iostream>#include "generic/Logger.hpp"#include "generic/Units.hpp"#include "generic/Time.hpp"#include "generic/Exceptions.hpp"#include "generic/PidController.hpp"#include "generic-joint/JointTrajectory.hpp"#include "youbot/YouBotJointParameter.hpp"#include "youbot/YouBotJointParameterPasswordProtected.hpp"#include "generic/dataobjectlockfree/DataObjectLockFree.hpp"
Include dependency graph for JointTrajectoryController.hpp:

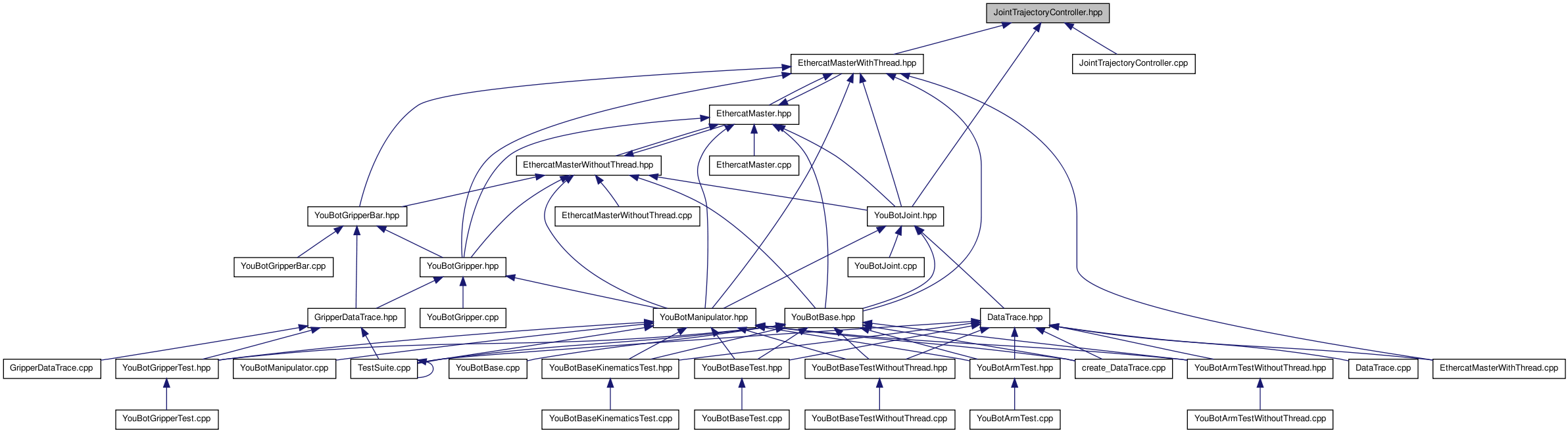
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| struct | Spline |
| Spline for a joint trajectory coef[0] + coef[1]*t + . More... | |
| struct | Segment |
| Joint trajectory segment. More... | |
| class | JointTrajectoryController |
| Joint Trajectory Controller. More... | |
