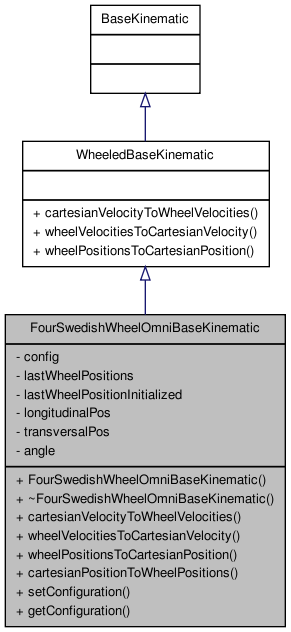
FourSwedishWheelOmniBaseKinematic Class Reference
Implementation of a base kinematic with four swedish wheels. More...
#include <FourSwedishWheelOmniBaseKinematic.hpp>
Public Member Functions | |
| FourSwedishWheelOmniBaseKinematic () | |
| virtual | ~FourSwedishWheelOmniBaseKinematic () |
| virtual void | cartesianVelocityToWheelVelocities (const quantity< si::velocity > &longitudinalVelocity, const quantity< si::velocity > &transversalVelocity, const quantity< si::angular_velocity > &angularVelocity, std::vector< quantity< angular_velocity > > &wheelVelocities) |
| Calculates from the cartesian velocity the individual wheel velocities. | |
| virtual void | wheelVelocitiesToCartesianVelocity (const std::vector< quantity< angular_velocity > > &wheelVelocities, quantity< si::velocity > &longitudinalVelocity, quantity< si::velocity > &transversalVelocity, quantity< angular_velocity > &angularVelocity) |
| Calculates from the wheel velocities the cartesian velocity. | |
| virtual void | wheelPositionsToCartesianPosition (const std::vector< quantity< plane_angle > > &wheelPositions, quantity< si::length > &longitudinalPosition, quantity< si::length > &transversalPosition, quantity< plane_angle > &orientation) |
| Calculates from the wheel positions the cartesian position. | |
| virtual void | cartesianPositionToWheelPositions (const quantity< si::length > &longitudinalPosition, const quantity< si::length > &transversalPosition, const quantity< plane_angle > &orientation, std::vector< quantity< plane_angle > > &wheelPositions) |
| Calculates from the cartesian position the wheel positions. | |
| void | setConfiguration (const FourSwedishWheelOmniBaseKinematicConfiguration &configuration) |
| void | getConfiguration (FourSwedishWheelOmniBaseKinematicConfiguration &configuration) const |
Detailed Description
Implementation of a base kinematic with four swedish wheels.
The youBot base kinematic.
Definition at line 66 of file FourSwedishWheelOmniBaseKinematic.hpp.
Constructor & Destructor Documentation
Definition at line 54 of file FourSwedishWheelOmniBaseKinematic.cpp.
| ~FourSwedishWheelOmniBaseKinematic | ( | ) | [virtual] |
Definition at line 60 of file FourSwedishWheelOmniBaseKinematic.cpp.
Member Function Documentation
| void cartesianPositionToWheelPositions | ( | const quantity< si::length > & | longitudinalPosition, | |
| const quantity< si::length > & | transversalPosition, | |||
| const quantity< plane_angle > & | orientation, | |||
| std::vector< quantity< plane_angle > > & | wheelPositions | |||
| ) | [virtual] |
Calculates from the cartesian position the wheel positions.
- Parameters:
-
longitudinalPosition is the forward or backward position transversalPosition is the sideway position orientation is the rotation around the center wheelPositions are the individual positions of the wheels
Definition at line 184 of file FourSwedishWheelOmniBaseKinematic.cpp.

| void cartesianVelocityToWheelVelocities | ( | const quantity< si::velocity > & | longitudinalVelocity, | |
| const quantity< si::velocity > & | transversalVelocity, | |||
| const quantity< si::angular_velocity > & | angularVelocity, | |||
| std::vector< quantity< angular_velocity > > & | wheelVelocities | |||
| ) | [virtual] |
Calculates from the cartesian velocity the individual wheel velocities.
- Parameters:
-
longitudinalVelocity is the forward or backward velocity transversalVelocity is the sideway velocity angularVelocity is the rotational velocity around the center of the YouBot wheelVelocities are the individual wheel velocities
Definition at line 70 of file FourSwedishWheelOmniBaseKinematic.cpp.

| void getConfiguration | ( | FourSwedishWheelOmniBaseKinematicConfiguration & | configuration | ) | const |
Definition at line 219 of file FourSwedishWheelOmniBaseKinematic.cpp.
| void setConfiguration | ( | const FourSwedishWheelOmniBaseKinematicConfiguration & | configuration | ) |
Definition at line 213 of file FourSwedishWheelOmniBaseKinematic.cpp.
| void wheelPositionsToCartesianPosition | ( | const std::vector< quantity< plane_angle > > & | wheelPositions, | |
| quantity< si::length > & | longitudinalPosition, | |||
| quantity< si::length > & | transversalPosition, | |||
| quantity< plane_angle > & | orientation | |||
| ) | [virtual] |
Calculates from the wheel positions the cartesian position.
- Parameters:
-
wheelPositions are the individual positions of the wheels longitudinalPosition is the forward or backward position transversalPosition is the sideway position orientation is the rotation around the center
Implements WheeledBaseKinematic.
Definition at line 130 of file FourSwedishWheelOmniBaseKinematic.cpp.

| void wheelVelocitiesToCartesianVelocity | ( | const std::vector< quantity< angular_velocity > > & | wheelVelocities, | |
| quantity< si::velocity > & | longitudinalVelocity, | |||
| quantity< si::velocity > & | transversalVelocity, | |||
| quantity< angular_velocity > & | angularVelocity | |||
| ) | [virtual] |
Calculates from the wheel velocities the cartesian velocity.
- Parameters:
-
wheelVelocities are the velocities of the individual wheels longitudinalVelocity is the forward or backward velocity transversalVelocity is the sideway velocity angularVelocity is the rotational velocity around the center of the YouBot
Implements WheeledBaseKinematic.
Definition at line 103 of file FourSwedishWheelOmniBaseKinematic.cpp.

The documentation for this class was generated from the following files:
