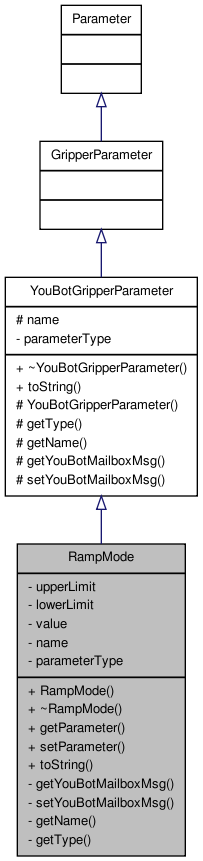
RampMode Class Reference
Automatically set when using ROR, ROL, MST and MVP. More...
#include <YouBotGripperParameter.hpp>
Public Member Functions | |
| RampMode () | |
| virtual | ~RampMode () |
| void | getParameter (unsigned int ¶meter) const |
| void | setParameter (const unsigned int ¶meter) |
| void | toString (std::string &value) const |
Friends | |
| class | YouBotGripper |
| class | YouBotGripperBar |
Detailed Description
Automatically set when using ROR, ROL, MST and MVP.
0: position mode. Steps are generated, when the parameters actual position and target position differ. Trapezoidal speed ramps are provided. 2: velocity mode. The motor will run continuously and the speed will be changed with constant (maximum) acceleration, if the parameter target speed is changed. For special purposes, the soft mode (value 1) with exponential decrease of speed can be selected.
Definition at line 1188 of file YouBotGripperParameter.hpp.
Constructor & Destructor Documentation
| RampMode | ( | ) |
Definition at line 1502 of file YouBotGripperParameter.cpp.
| ~RampMode | ( | ) | [virtual] |
Definition at line 1511 of file YouBotGripperParameter.cpp.
Member Function Documentation
| void getParameter | ( | unsigned int & | parameter | ) | const |
Definition at line 1516 of file YouBotGripperParameter.cpp.
| void setParameter | ( | const unsigned int & | parameter | ) |
Definition at line 1522 of file YouBotGripperParameter.cpp.
| void toString | ( | std::string & | value | ) | const [virtual] |
Implements YouBotGripperParameter.
Definition at line 1535 of file YouBotGripperParameter.cpp.
Friends And Related Function Documentation
friend class YouBotGripper [friend] |
Reimplemented from YouBotGripperParameter.
Definition at line 1189 of file YouBotGripperParameter.hpp.
friend class YouBotGripperBar [friend] |
Reimplemented from YouBotGripperParameter.
Definition at line 1190 of file YouBotGripperParameter.hpp.
The documentation for this class was generated from the following files:
