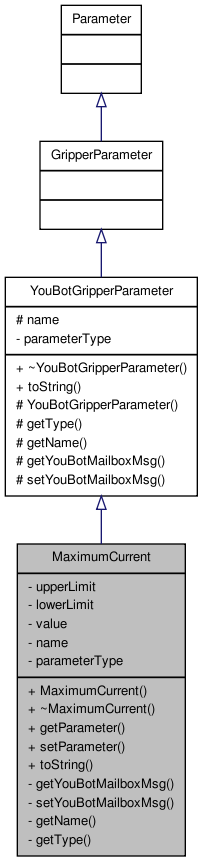
MaximumCurrent Class Reference
The most important motor setting, since too high values might cause motor damage! The maximum value is 255. More...
#include <YouBotGripperParameter.hpp>
Public Member Functions | |
| MaximumCurrent () | |
| virtual | ~MaximumCurrent () |
| void | getParameter (int ¶meter) const |
| void | setParameter (const int parameter) |
| void | toString (std::string &value) const |
Friends | |
| class | YouBotGripper |
| class | YouBotGripperBar |
Detailed Description
The most important motor setting, since too high values might cause motor damage! The maximum value is 255.
This value means 100% of the maximum current of the module. The current adjustment is within the range 0... 255 and can be adjusted in 32 steps (0... 255 divided by eight; e.g. step 0 = 0... 7, step 1 = 8... 15 and so on).
Definition at line 946 of file YouBotGripperParameter.hpp.
Constructor & Destructor Documentation
| MaximumCurrent | ( | ) |
Definition at line 1177 of file YouBotGripperParameter.cpp.
| ~MaximumCurrent | ( | ) | [virtual] |
Definition at line 1186 of file YouBotGripperParameter.cpp.
Member Function Documentation
| void getParameter | ( | int & | parameter | ) | const |
Definition at line 1191 of file YouBotGripperParameter.cpp.
| void setParameter | ( | const int | parameter | ) |
Definition at line 1197 of file YouBotGripperParameter.cpp.
| void toString | ( | std::string & | value | ) | const [virtual] |
Implements YouBotGripperParameter.
Definition at line 1210 of file YouBotGripperParameter.cpp.
Friends And Related Function Documentation
friend class YouBotGripper [friend] |
Reimplemented from YouBotGripperParameter.
Definition at line 947 of file YouBotGripperParameter.hpp.
friend class YouBotGripperBar [friend] |
Reimplemented from YouBotGripperParameter.
Definition at line 948 of file YouBotGripperParameter.hpp.
The documentation for this class was generated from the following files:
