YouBotManipulator Class Reference
It groups the manipulator joints and the gripper together. More...
#include <YouBotManipulator.hpp>
Public Member Functions | |
| YouBotManipulator (const std::string name, const std::string configFilePath="../config/") | |
| virtual | ~YouBotManipulator () |
| void | doJointCommutation () |
| does the sine commutation of the arm joints | |
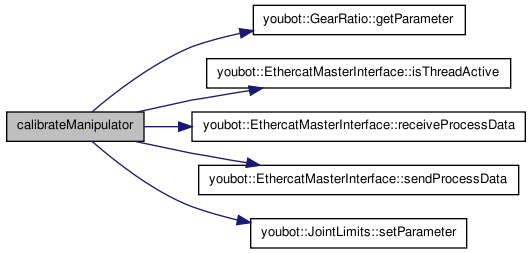
| void | calibrateManipulator (const bool forceCalibration=false) |
| calibrate the reference position of the arm joints | |
| void | calibrateGripper (const bool forceCalibration=false) |
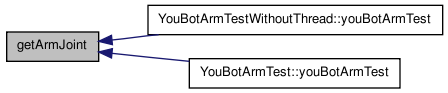
| YouBotJoint & | getArmJoint (const unsigned int armJointNumber) |
| return a joint form the arm1 | |
| YouBotGripper & | getArmGripper () |
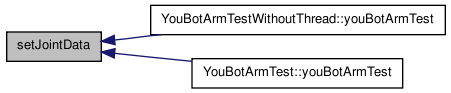
| virtual void | setJointData (const std::vector< JointAngleSetpoint > &JointData) |
| commands positions or angles to all manipulator joints all positions will be set at the same time | |
| virtual void | getJointData (std::vector< JointSensedAngle > &data) |
| gets the position or angle of all manipulator joints which have been calculated from the actual encoder value These values are all read at the same time from the different joints | |
| virtual void | setJointData (const std::vector< JointVelocitySetpoint > &JointData) |
| commands velocities to all manipulator joints all velocities will be set at the same time | |
| virtual void | getJointData (std::vector< JointSensedVelocity > &data) |
| gets the velocities of all manipulator joints which have been calculated from the actual encoder values These values are all read at the same time from the different joints | |
| virtual void | setJointData (const std::vector< JointCurrentSetpoint > &JointData) |
| commands current to all manipulator joints all current values will be set at the same time | |
| virtual void | getJointData (std::vector< JointSensedCurrent > &data) |
| gets the motor currents of all manipulator joints which have been measured by a hal sensor These values are all read at the same time from the different joints | |
| virtual void | setJointData (const std::vector< JointTorqueSetpoint > &JointData) |
| commands torque to all manipulator joints all torque values will be set at the same time | |
| virtual void | getJointData (std::vector< JointSensedTorque > &data) |
| gets the joint torque of all manipulator joints which have been calculated from the current These values are all read at the same time from the different joints | |
Detailed Description
It groups the manipulator joints and the gripper together.
Definition at line 77 of file YouBotManipulator.hpp.
Constructor & Destructor Documentation
| YouBotManipulator | ( | const std::string | name, | |
| const std::string | configFilePath = "../config/" | |||
| ) |

| ~YouBotManipulator | ( | ) | [virtual] |

Member Function Documentation
| void calibrateGripper | ( | const bool | forceCalibration = false |
) |
Definition at line 268 of file YouBotManipulator.cpp.


| void calibrateManipulator | ( | const bool | forceCalibration = false |
) |
calibrate the reference position of the arm joints
Definition at line 108 of file YouBotManipulator.cpp.

| void doJointCommutation | ( | ) |
does the sine commutation of the arm joints
Definition at line 94 of file YouBotManipulator.cpp.

| YouBotGripper & getArmGripper | ( | ) |

| YouBotJoint & getArmJoint | ( | const unsigned int | armJointNumber | ) |
return a joint form the arm1
- Parameters:
-
armJointNumber 1-5 for the arm joints
Definition at line 283 of file YouBotManipulator.cpp.
| void getJointData | ( | std::vector< JointSensedTorque > & | data | ) | [virtual] |
gets the joint torque of all manipulator joints which have been calculated from the current These values are all read at the same time from the different joints
- Parameters:
-
data returns the actual joint torque by reference
Definition at line 426 of file YouBotManipulator.cpp.

| void getJointData | ( | std::vector< JointSensedCurrent > & | data | ) | [virtual] |
gets the motor currents of all manipulator joints which have been measured by a hal sensor These values are all read at the same time from the different joints
- Parameters:
-
data returns the actual motor currents by reference
Definition at line 392 of file YouBotManipulator.cpp.

| void getJointData | ( | std::vector< JointSensedVelocity > & | data | ) | [virtual] |
gets the velocities of all manipulator joints which have been calculated from the actual encoder values These values are all read at the same time from the different joints
- Parameters:
-
data returns the velocities by reference
Definition at line 358 of file YouBotManipulator.cpp.

| void getJointData | ( | std::vector< JointSensedAngle > & | data | ) | [virtual] |
gets the position or angle of all manipulator joints which have been calculated from the actual encoder value These values are all read at the same time from the different joints
- Parameters:
-
data returns the angles by reference
Definition at line 324 of file YouBotManipulator.cpp.

| void setJointData | ( | const std::vector< JointTorqueSetpoint > & | JointData | ) | [virtual] |
commands torque to all manipulator joints all torque values will be set at the same time
- Parameters:
-
JointData the to command torque
Definition at line 408 of file YouBotManipulator.cpp.

| void setJointData | ( | const std::vector< JointCurrentSetpoint > & | JointData | ) | [virtual] |
commands current to all manipulator joints all current values will be set at the same time
- Parameters:
-
JointData the to command current
Definition at line 374 of file YouBotManipulator.cpp.

| void setJointData | ( | const std::vector< JointVelocitySetpoint > & | JointData | ) | [virtual] |
commands velocities to all manipulator joints all velocities will be set at the same time
- Parameters:
-
JointData the to command velocities
Definition at line 340 of file YouBotManipulator.cpp.

| void setJointData | ( | const std::vector< JointAngleSetpoint > & | JointData | ) | [virtual] |
commands positions or angles to all manipulator joints all positions will be set at the same time
- Parameters:
-
JointData the to command positions
Definition at line 305 of file YouBotManipulator.cpp.

The documentation for this class was generated from the following files:
