YouBotJointParameterPasswordProtected.hpp File Reference
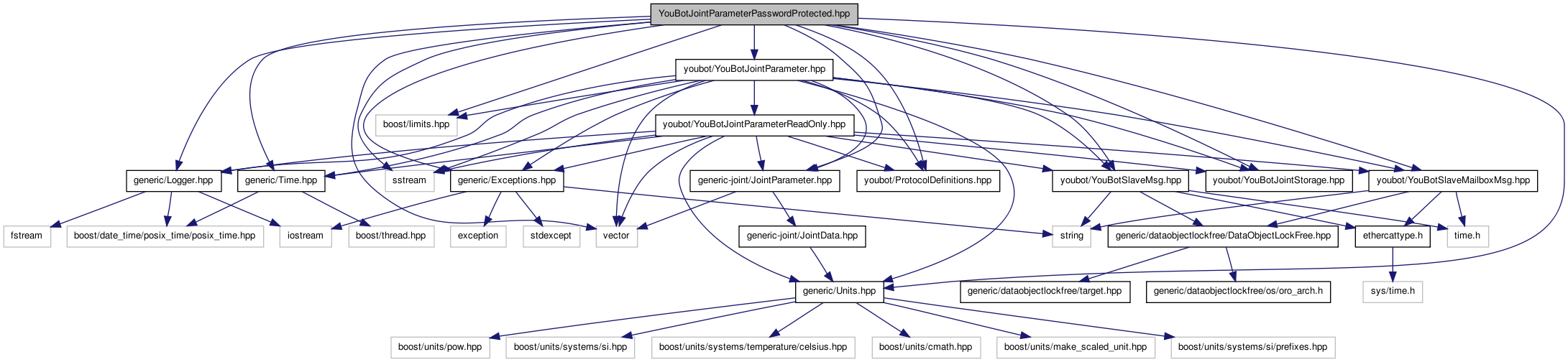
#include <vector>#include <sstream>#include <boost/limits.hpp>#include "generic/Logger.hpp"#include "generic/Units.hpp"#include "generic/Time.hpp"#include "generic/Exceptions.hpp"#include "generic-joint/JointParameter.hpp"#include "youbot/YouBotJointParameter.hpp"#include "youbot/ProtocolDefinitions.hpp"#include "youbot/YouBotSlaveMsg.hpp"#include "youbot/YouBotSlaveMailboxMsg.hpp"#include "youbot/YouBotJointStorage.hpp"
Include dependency graph for YouBotJointParameterPasswordProtected.hpp:
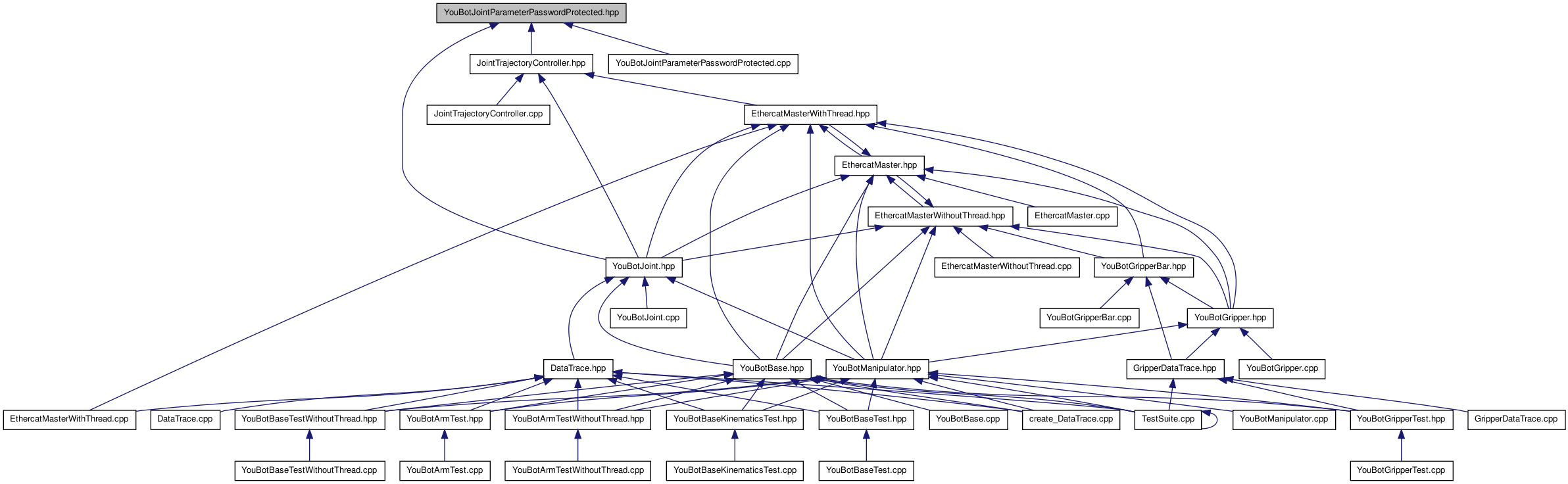
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| class | YouBotJointParameterPasswordProtected |
| abstract youBot joint parameter More... | |
| class | ActivateOvervoltageProtection |
| Enable overvoltage protection. More... | |
| class | ActualCommutationOffset |
| This value represents the internal commutation offset. More... | |
| class | ApproveProtectedParameters |
| Enter a password to approve the change of protected parameters. More... | |
| class | BEMFConstant |
| BEMF constant of motor. More... | |
| class | CommutationMode |
| The Commutation Mode. More... | |
| class | CommutationMotorCurrent |
| Motor current for controlled commutation. More... | |
| class | CurrentControlLoopDelay |
| Delay of current limitation algorithm / PID current regulator. More... | |
| class | EncoderResolution |
| Encoder Steps per Rotation. More... | |
| class | EncoderStopSwitch |
| Encoder stop switch. More... | |
| class | HallSensorPolarityReversal |
| Hall sensor invert. More... | |
| class | I2tExceedCounter |
| Counts how often an I2t sum was higher than the I2t limit. More... | |
| class | I2tLimit |
| An actual I2t sum that exceeds this limit leads to increasing the I2t exceed counter. More... | |
| class | InitializationMode |
| Initialization Mode. More... | |
| class | InitSineDelay |
| Duration for sine initialization sequence. More... | |
| class | MassInertiaConstant |
| Mass inertia constant for position regulation. More... | |
| class | MaximumMotorCurrent |
| maximum allowed current More... | |
| class | MotorCoilResistance |
| Resistance of motor coil. More... | |
| class | MotorControllerTimeout |
| Set/Get Timeout to determine an interrupted communication with the EtherCAT master. More... | |
| class | MotorPoles |
| Number of motor poles. More... | |
| class | OperationalTime |
| Counts the module operational time. More... | |
| class | PIDControlTime |
| PID calculation delay: Set operational frequency PID. More... | |
| class | ReversingEncoderDirection |
| Encoder direction Set this flag in a way, that turn right increases position counter. More... | |
| class | SetEncoderCounterZeroAtNextNChannel |
| Set Encoder counter to zero at next N channel event. More... | |
| class | SetEncoderCounterZeroAtNextSwitch |
| Set encoder counter to zero at next switch event. More... | |
| class | SetEncoderCounterZeroOnlyOnce |
| 1: Set encoder counter zero only once NULL 0: always at an N channel event, respectively switch event. More... | |
| class | SineInitializationVelocity |
| Velocity for sine initialization. More... | |
| class | StopSwitchPolarity |
| Stop switch polarity. More... | |
| class | ThermalWindingTimeConstant |
| Thermal winding time constant for the used motor. More... | |
| class | MotorHaltedVelocity |
| If the actual speed is below this value the motor halted flag will be set. More... | |
