YouBotJointParameter.hpp File Reference
#include <vector>#include <sstream>#include <boost/limits.hpp>#include "generic/Logger.hpp"#include "generic/Units.hpp"#include "generic/Time.hpp"#include "generic/Exceptions.hpp"#include "generic-joint/JointParameter.hpp"#include "youbot/YouBotJointParameterReadOnly.hpp"#include "youbot/ProtocolDefinitions.hpp"#include "youbot/YouBotSlaveMsg.hpp"#include "youbot/YouBotSlaveMailboxMsg.hpp"#include "youbot/YouBotJointStorage.hpp"
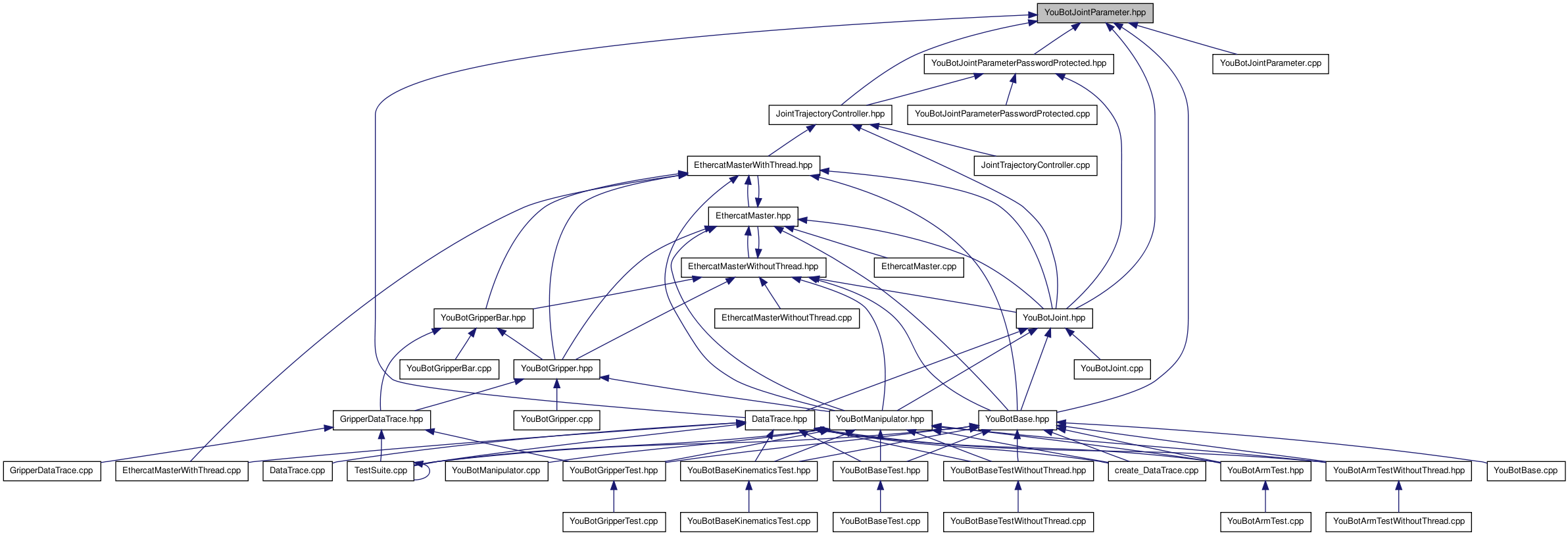
Include dependency graph for YouBotJointParameter.hpp:

This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| class | YouBotApiJointParameter |
| abstract youBot API joint parameter More... | |
| class | YouBotJointParameter |
| abstract youBot joint parameter More... | |
| class | JointName |
| the name of the joint More... | |
| class | InitializeJoint |
| Initialize Joint. More... | |
| class | CalibrateJoint |
| calibrates the joint More... | |
| class | FirmwareVersion |
| the firmware version of the joint More... | |
| class | GearRatio |
| the gear ratio which is needed for the calculations in the youBot driver More... | |
| class | EncoderTicksPerRound |
| the resolution of the encoders, it is needed for the calculations of the youBot Driver More... | |
| class | InverseMovementDirection |
| inverse the joint movement direction More... | |
| class | JointLimits |
| joint position limits in encoder ticks More... | |
| class | JointLimitsRadian |
| joint position limits in radian More... | |
| class | TorqueConstant |
| the resolution of the encoders, it is needed for the calculations of the youBot Driver More... | |
| class | MaximumPositioningVelocity |
| The maximum velocity used for move to position command when executing a ramp to a position. More... | |
| class | MotorAcceleration |
| Acceleration parameter for velocity control and position control. More... | |
| class | RampGeneratorSpeedAndPositionControl |
| Switches the ramp generator for speed and position control on and off. More... | |
| class | PositionControlSwitchingThreshold |
| Switching threshold for position control between the first and second set of parameters. More... | |
| class | SpeedControlSwitchingThreshold |
| Adjusts the limit to switch between first velocity PID parameter set and second velocity PID parameter set. More... | |
| class | VelocityThresholdForHallFX |
| Velocity to switch from controlled to hallFX mode. More... | |
| class | PParameterFirstParametersPositionControl |
| P-Parameter of PID position regulator (first position parameter set). More... | |
| class | IParameterFirstParametersPositionControl |
| I-Parameter of PID position regulator (first position parameter set). More... | |
| class | DParameterFirstParametersPositionControl |
| D-Parameter of PID position regulator (first position parameter set). More... | |
| class | IClippingParameterFirstParametersPositionControl |
| Adjust in standstill to lowest possible value at which the motor keeps its position. More... | |
| class | PParameterFirstParametersSpeedControl |
| P-Parameter of PID velocity regulator. More... | |
| class | IParameterFirstParametersSpeedControl |
| I-Parameter of PID velocity regulator. More... | |
| class | DParameterFirstParametersSpeedControl |
| D-Parameter of PID velocity regulator. More... | |
| class | IClippingParameterFirstParametersSpeedControl |
| This PID parameter set is used at lower velocity. More... | |
| class | PParameterSecondParametersPositionControl |
| P-Parameter of PID position regulator (second position parameter set). More... | |
| class | IParameterSecondParametersPositionControl |
| I-Parameter of PID position regulator (second position parameter set). More... | |
| class | DParameterSecondParametersPositionControl |
| D-Parameter of PID position regulator (second position parameter set). More... | |
| class | IClippingParameterSecondParametersPositionControl |
| Adjust in standstill to lowest possible value at which the motor keeps its position. More... | |
| class | PParameterSecondParametersSpeedControl |
| P-Parameter of PID velocity regulator (second position parameter set). More... | |
| class | IParameterSecondParametersSpeedControl |
| I-Parameter of PID velocity regulator (second position parameter set). More... | |
| class | DParameterSecondParametersSpeedControl |
| D-Parameter of PID velocity regulator (second position parameter set). More... | |
| class | IClippingParameterSecondParametersSpeedControl |
| I-Clipping Parameter of PID current regulator. More... | |
| class | PParameterCurrentControl |
| P-Parameter of PID current regulator. More... | |
| class | IParameterCurrentControl |
| I-Parameter of PID current regulator. More... | |
| class | DParameterCurrentControl |
| D-Parameter of PID current regulator. More... | |
| class | IClippingParameterCurrentControl |
| I-Clipping Parameter of PID current regulator. More... | |
| class | MaximumVelocityToSetPosition |
| Maximum velocity at which end position can be set. More... | |
| class | PositionTargetReachedDistance |
| Maximum distance at which the position end flag is set. More... | |
| class | ClearI2tExceededFlag |
| Clear the flag that indicates that the I2t sum has exceeded the I2t limit. More... | |
| class | ClearMotorControllerTimeoutFlag |
| Clear the flag that indicates a communication timeout between the EtherCAT master and the controller. More... | |
| class | PParameterTrajectoryControl |
| P-Parameter of PID trajectory regulator. More... | |
| class | IParameterTrajectoryControl |
| I-Parameter of PID trajectory regulator. More... | |
| class | DParameterTrajectoryControl |
| D-Parameter of PID trajectory regulator. More... | |
| class | IClippingParameterTrajectoryControl |
| gives a limit for the I sum part of the trajectory regulator More... | |
Enumerations | |
| enum | CalibrationDirection { POSITIV, NEGATIV } |
