YouBotGripperParameter.hpp File Reference
#include <vector>#include <sstream>#include "generic/Logger.hpp"#include "generic/Units.hpp"#include "generic/Time.hpp"#include "generic/Exceptions.hpp"#include "generic-joint/JointParameter.hpp"#include "generic-gripper/GripperParameter.hpp"#include "youbot/ProtocolDefinitions.hpp"#include "youbot/YouBotSlaveMsg.hpp"#include "youbot/YouBotSlaveMailboxMsg.hpp"
Include dependency graph for YouBotGripperParameter.hpp:

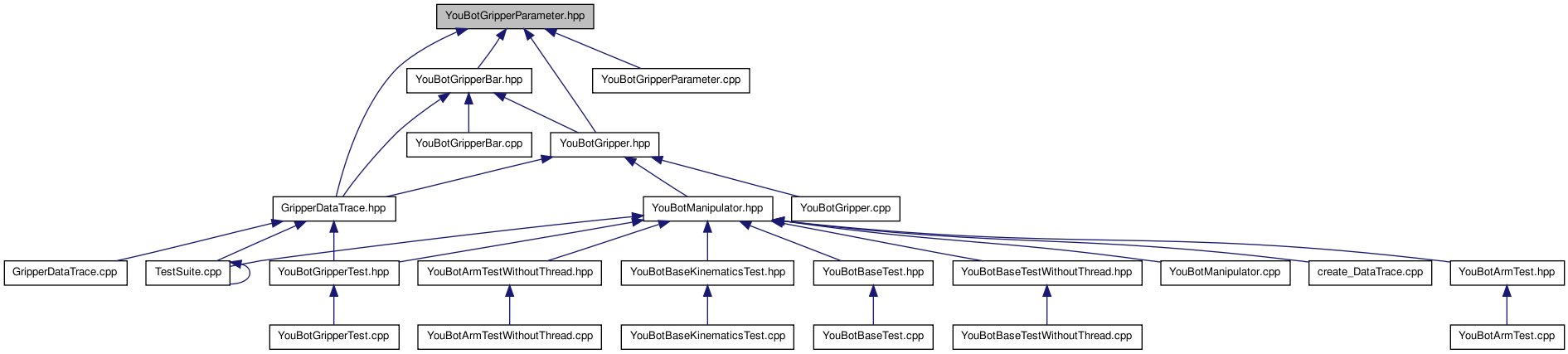
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| class | YouBotGripperParameter |
| abstract youBot gripper parameter More... | |
| class | GripperFirmwareVersion |
| the firmware version of the gripper More... | |
| class | GripperBarName |
| The name for a gripper bar or finger. More... | |
| class | CalibrateGripper |
| Calibrate the gripper. More... | |
| class | BarSpacingOffset |
| Represents a bar spacing offset. More... | |
| class | MaxEncoderValue |
| The encoder value when the gripper has reached it's maximum bar spacing position. More... | |
| class | MaxTravelDistance |
| The maximum bar spacing distance of the gripper. More... | |
| class | ActualPosition |
| Actual position of one gripper bar. More... | |
| class | PositionSetpoint |
| Position setpoint for one gripper bar. More... | |
| class | TargetPositionReached |
| Indicates that the actual position equals the target position. More... | |
| class | ActualVelocity |
| Actual velocity of one gripper bar. More... | |
| class | VelocitySetpoint |
| Velocity setpoint for one gripper bar. More... | |
| class | ActualLoadValue |
| Readout of the actual load value with used for stall detection (stallGuard2). More... | |
| class | ChopperBlankTime |
| Selects the comparator blank time. More... | |
| class | ChopperHysteresisDecrement |
| Hysteresis decrement setting. More... | |
| class | ChopperHysteresisEnd |
| Hysteresis end setting. More... | |
| class | ChopperHysteresisStart |
| Hysteresis start setting. More... | |
| class | ChopperMode |
| Selection of the chopper mode: 0 spread cycle 1 classic const. More... | |
| class | ChopperOffTime |
| The off time setting controls the minimum chopper frequency. More... | |
| class | DoubleStepEnable |
| Every edge of the cycle releases a step/microstep. More... | |
| class | ErrorFlags |
| Bit 0: stallGuardTM status (1: threshold reached) Bit 1: Overtemperature (1: driver is shut down due to overtemperature) Bit 2: Pre-warning overtemperature (1: Threshold is exceeded) Bit 3: Short to ground A (1: Short condition etected, driver currently shut down) Bit 4: Short to ground B (1: Short condition detected, driver currently shut down) Bit 5: Open load A (1: no chopper event has happened during the last period with constant coil polarity) Bit 6: Open load B (1: no chopper event has happened during the last period with constant coil polarity) Bit 7: Stand still (1: No step impulse occurred on the step input during the last 2^20 clock cycles). More... | |
| class | Freewheeling |
| Time after which the power to the motor will be cut when its velocity has reached zero. More... | |
| class | MaximumAcceleration |
| Acceleration parameter for velocity control and position control. More... | |
| class | MaximumCurrent |
| The most important motor setting, since too high values might cause motor damage! The maximum value is 255. More... | |
| class | MaximumPositioningSpeed |
| The limit for acceleration (and deceleration). More... | |
| class | MicrostepResolution |
| 0: full step 1: half step 2: 4 microsteps 3: 8 microsteps 4: 16 microsteps 5: 32 microsteps 6: 64 microsteps 7: 128 microsteps 8: 256 microsteps More... | |
| class | PowerDownDelay |
| Standstill period before the current is changed down to standby current. More... | |
| class | PulseDivisor |
| The exponent of the scaling factor for the pulse (step) generator should be de/incremented carefully (in steps of one). More... | |
| class | RampDivisor |
| The exponent of the scaling factor for the ramp generator- should be de/incremented carefully (in steps of one). More... | |
| class | RampMode |
| Automatically set when using ROR, ROL, MST and MVP. More... | |
| class | ShortDetectionTimer |
| 0: 3.2 s 1: 1.6 s 2: 1.2 s 3: 0.8 s Use default value! More... | |
| class | ShortProtectionDisable |
| 0: Short to GND protection is on 1: Short to GND protection is disabled Use default value! More... | |
| class | SlopeControlHighSide |
| Determines the slope of the motor driver outputs. More... | |
| class | SlopeControlLowSide |
| Determines the slope of the motor driver outputs. More... | |
| class | SmartEnergyActualCurrent |
| This status value provides the actual motor current setting as controlled by coolStepTM. More... | |
| class | SmartEnergyCurrentDownStep |
| Sets the number of stallGuard2 readings current down above the upper threshold necessary for each step current decrement of the motor current. More... | |
| class | SmartEnergyCurrentMinimum |
| Sets the lower motor current limit for current minimum coolStep operation by scaling the CS (Current Scale, see axis parameter 6) value. More... | |
| class | SmartEnergyCurrentUpStep |
| Sets the current increment step. More... | |
| class | SmartEnergyHysteresis |
| Sets the distance between the lower and the upper threshold for stallGuard2TM reading. More... | |
| class | SmartEnergyHysteresisStart |
| The lower threshold for the stallGuard2 value (see smart Energy current up step). More... | |
| class | SmartEnergySlowRunCurrent |
| Sets the motor current which is used below the threshold speed. More... | |
| class | SmartEnergyThresholdSpeed |
| Above this speed coolStep becomes enabled. More... | |
| class | StallGuard2FilterEnable |
| Enables the stallGuard2 filter for more precision of the measurement. More... | |
| class | StallGuard2Threshold |
| This signed value controls stallGuard2 threshold level for stall output and sets the optimum measurement range for readout. More... | |
| class | StandbyCurrent |
| The current limit two seconds after the motor has stopped. More... | |
| class | StepInterpolationEnable |
| Step interpolation is supported with a 16 microstep setting only. More... | |
| class | StopOnStall |
| Motor stop in case of stall. More... | |
| class | Vsense |
| sense resistor voltage based current scaling 0: Full scale sense resistor voltage is 1/18 VDD 1: Full scale sense resistor voltage is 1/36 VDD (refers to a current setting of 31 and DAC value 255) Use default value. More... | |
| class | ActualAcceleration |
| The current acceleration (read only). More... | |
| class | MinimumSpeed |
| Should always be set 1 to ensure exact reaching of the target position. More... | |
